 English
English


Robot, Cobot e AMR: collaborazione con l'uomo
GIVE ME FIVE, COBOT! - Uomo e robot in una collaborazione sicura
Marco Pelizzaro - Pilz Italia
Alessio Ragni, Pilz Italia
Sommario
- Storia e stato dell'arte dei ROBOT, COBOT e AMR
- ISO/TS 15066
- Integrazione delle soluzioni Pilz nella robotica collaborativa
- Sviluppi futuri ISO 10218
Storia e stato dell'arte dei ROBOT, COBOT e AMR
- Robot industriali tradizionali: macchine generalmente di medie - grandi dimensioni, impiegati nella produzione in cui sono importanti volumi elevati, estrema precisione e alti cicli di lavoro.
Cartesiani, SCARA, articolati, Delta (o spider), cilindrici e polari (meno utilizzati)
- Robot la cui applicazione è collaborativa: macchine di dimensioni generalmente più ridotte, impiegati nella produzione in cui i volumi sono più bassi e dove gli operatori sono presenti ad esempio per ispezionare l'oggetto lavorato dal robot oppure per completare un assemblaggio.
Cartesiani, SCARA, articolati, Cobot
Autonomous Robots: macchine intelligenti che possono eseguire compiti e operare in un ambiente in modo indipendente, senza controllo o intervento umano; applicazioni tipiche in magazzino o impianto di spedizione.
AMR
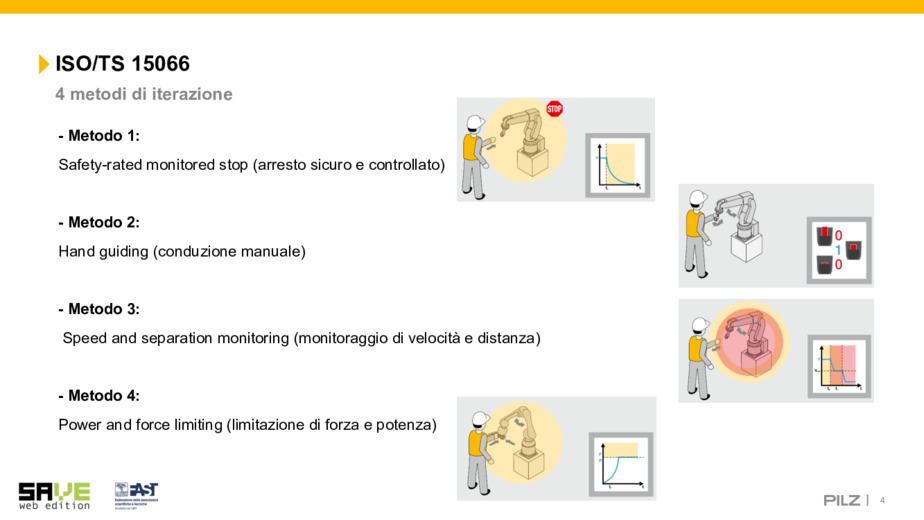
ISO/TS 15066: 4 metodi di iterazione
- Metodo 1: Safety-rated monitored stop (arresto sicuro e controllato)
- Metodo 2: Hand guiding (conduzione manuale)
- Metodo 3: Speed and separation monitoring (monitoraggio di velocità e distanza)
- Metodo 4: Power and force limiting (limitazione di forza e potenza)
Integrazione delle soluzioni Pilz nella robotica collaborativa, alcuni esempi.
Sviluppi futuri ISO 10218
ISO/FDIS 10218-1 Part 1: Robots
ISO/FDIS 10218-2 Part 2: Industrial robot systems, robot applications and robot cells
- Robot industriali tradizionali: macchine generalmente di medie - grandi dimensioni, impiegati nella produzione in cui sono importanti volumi elevati, estrema precisione e alti cicli di lavoro.
Cartesiani, SCARA, articolati, Delta (o spider), cilindrici e polari (meno utilizzati)
- Robot la cui applicazione è collaborativa: macchine di dimensioni generalmente più ridotte, impiegati nella produzione in cui i volumi sono più bassi e dove gli operatori sono presenti ad esempio per ispezionare l'oggetto lavorato dal robot oppure per completare un assemblaggio.
Cartesiani, SCARA, articolati, Cobot
Autonomous Robots: macchine intelligenti che possono eseguire compiti e operare in un ambiente in modo indipendente, senza controllo o intervento umano; applicazioni tipiche in magazzino o impianto di spedizione.
AMR
ISO/TS 15066: 4 metodi di iterazione
- Metodo 1: Safety-rated monitored stop (arresto sicuro e controllato)
- Metodo 2: Hand guiding (conduzione manuale)
- Metodo 3: Speed and separation monitoring (monitoraggio di velocità e distanza)
- Metodo 4: Power and force limiting (limitazione di forza e potenza)
Integrazione delle soluzioni Pilz nella robotica collaborativa, alcuni esempi.
Sviluppi futuri ISO 10218
ISO/FDIS 10218-1 Part 1: Robots
ISO/FDIS 10218-2 Part 2: Industrial robot systems, robot applications and robot cells
Video
 Leggi tutto
Leggi tutto
Fonte: SAVE Cobot Web Edition maggio 2022 I PLC e la robotica collaborativa
Settori: Automazione industriale, HMI, Meccanica, PLC, Robot, Sistemi di controllo, Smart manufacturing
Mercati: Industria manifatturiera























