English
English


Robotica collaborativa e interfacce indossabili
Robotica collaborativa aumentata tramite interfacce indossabili
Gianluca Palli - Università Degli Studi di Bologna
Sommario
I robot collaborativi offrono una serie di funzionalità avanzate che li rendono interessanti per l'implementazione di linee di produzione innovative.
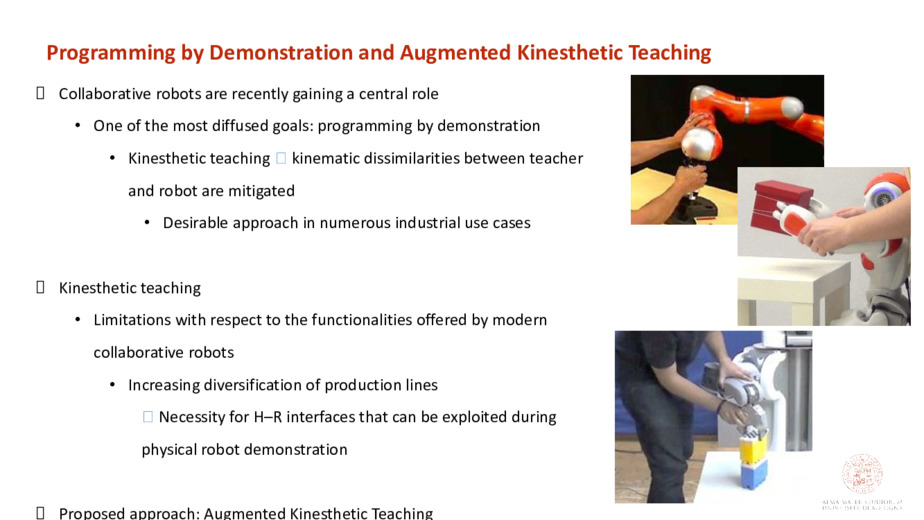
Tra le tecniche di interazione e programmazione più utilizzate si annovera il "teaching by demonstration", ovvero l'insegnamento cinestetico delle traiettorie da parte di un operatore che guida fisicamente il tool del robot. Tale modalità è altamente intuitiva e funzionale in molte applicazioni che coinvolgono utenti non esperti.
Tuttavia, l'insegnamento cinestetico non offre la possibilità di sfruttare appieno le moderne funzionalità dei robot collaborativi, come la modellazione dell'impedenza per programmare interazioni fisiche fluide. In questo intervento verranno presentate tecniche innovative di robotica collaborativa aumentata in cui l'operatore è supportato da interfacce indossabili che consentono di programmare parametri aggiuntivi del robot, come la selezioni di particolari modalità di funzionamento o vincoli per l'ottimizzazione della traiettoria, contemporaneamente all'apprendimento della traiettoria.
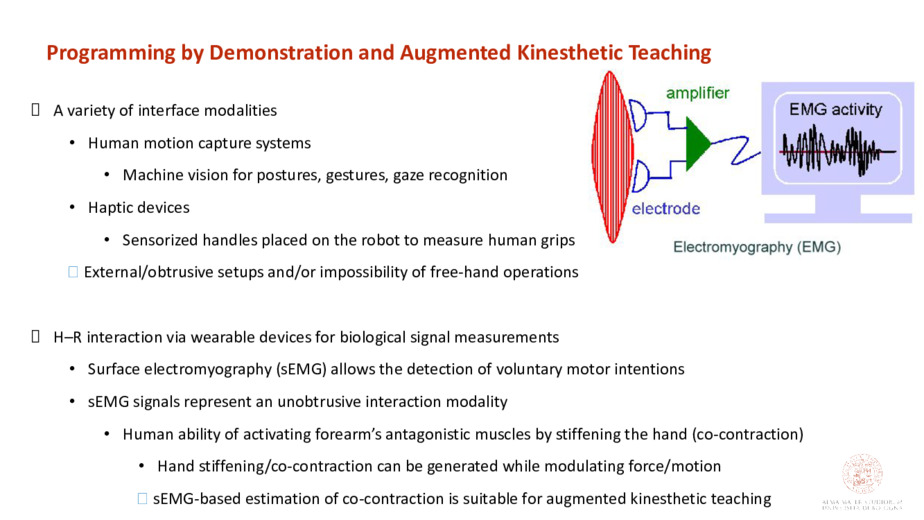
Le interfacce indossabili sono composta da elettromiografia di superficie (sEMG) e stimolazione vibrotattile, ed è progettata per fornire capacità di programmazione aggiuntive senza ostacolare l'insegnamento simultaneo della traiettoria. Le stesse tecniche possono essere utilizzate per rilevare situazioni di stress negli operatori che collaborano con robot, in modo da adattare il funzionamento del robot alle reazioni e alla sensibilità dei singoli soggetti.
I risultati preliminari forniscono risultati positivi sull'intuitività e l'efficacia del sistema e dell'approccio proposti, aprendo nuove prospettive per il futuro.
La presentazione è in lingua inglese.
Tuttavia, l'insegnamento cinestetico non offre la possibilità di sfruttare appieno le moderne funzionalità dei robot collaborativi, come la modellazione dell'impedenza per programmare interazioni fisiche fluide. In questo intervento verranno presentate tecniche innovative di robotica collaborativa aumentata in cui l'operatore è supportato da interfacce indossabili che consentono di programmare parametri aggiuntivi del robot, come la selezioni di particolari modalità di funzionamento o vincoli per l'ottimizzazione della traiettoria, contemporaneamente all'apprendimento della traiettoria.
Le interfacce indossabili sono composta da elettromiografia di superficie (sEMG) e stimolazione vibrotattile, ed è progettata per fornire capacità di programmazione aggiuntive senza ostacolare l'insegnamento simultaneo della traiettoria. Le stesse tecniche possono essere utilizzate per rilevare situazioni di stress negli operatori che collaborano con robot, in modo da adattare il funzionamento del robot alle reazioni e alla sensibilità dei singoli soggetti.
I risultati preliminari forniscono risultati positivi sull'intuitività e l'efficacia del sistema e dell'approccio proposti, aprendo nuove prospettive per il futuro.
La presentazione è in lingua inglese.
Video
 Leggi tutto
Leggi tutto
Fonte: SAVE Cobot Web Edition maggio 2022 I PLC e la robotica collaborativa
Settori: Automazione industriale, HMI, Meccanica, PLC, Robot, Sistemi di controllo, Smart manufacturing
Mercati: Industria manifatturiera