English
English


Sistemi di visione per la robotica: scenari, tendenze e prospettive
Basilio Bona - Politecnico di Torino
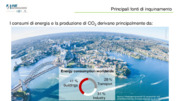
Negli ’90 – ’00 vengono introdotti i sistemi di visione per la manipolazione, la verifica e la caratterizzazione qualitativa dei pezzi lavorati (difettosità, controllo finale, rispetto delle specifiche geometriche, packaging). La visione 2D non è più sufficiente e si utilizzano sistemi 3D che permettono di risolvere problemi nuovi come la manipolazione di oggetti con forme/profili complessi, la raccolta da contenitori alla rinfusa, il packaging di prodotti di forme variabili con occlusioni parziali o totali. La taratura automatica può essere utilizzata per ricalibrare il sistema di visione quando, ad esempio, la linea di produzione deve essere fermata o modificata per eseguire modifiche nella lavorazione.


 Leggi tutto
Leggi tutto
Fonte: Tavola Rotonda "Approcci innovativi e applicazioni della visione artificiale", Aosta, 2010
Settori: Automazione industriale, Meccanica, Robot, Sicurezza industriale, Sistemi di visione, Strumentazione industriale, Taratura