 English
English


Decentralized sensor fusion for ubiquitous networking robotics in urban areas
Alberto Sanfeliu - CSIC-UPC
(in lingua inglese)
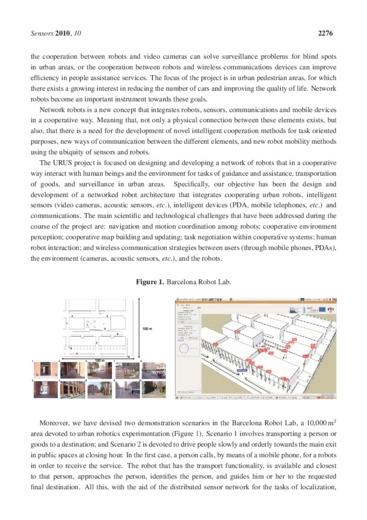
We have presented in this article the architecture design of the URUS sensors for a Network Robot System. This architecture has been deployed in a real urban environment and is used to test and verify people assistant Robot services. We have described the sensors used in several of the robots that we have built and the sensors that we have deployed in the urban environment. Moreover, we have described an example how to fuse such heterogeneous sensor information during urban robotic tasks using among other techniques, decentralized data fusion, information-based filtering, and asynchronous data handling.

 Leggi tutto
Leggi tutto
Fonte: Pubblicazione Sensors, 2010
Mercati: Industria manifatturiera



















